
Extras din referat
Pentru a se putea deplasa fara sa se izbeasca de primul obiect întâlnit în cale, robotul foloseste diversi senzori.
Senzorii au rolul de a prelua informaţia primară referitoare la mărimile măsurate (achiziţionate) din sistem, mărimi care sunt în general de natură neelectrică şi de a converti această informaţie într-o mărime de natură electrică.
Rolul senzorului este de a transforma o mărime fizică de intrare (energie), provenită din mediu, într-o mărime electrică (de obicei) de ieşire, mărime ce poate fi măsurată, prelucrată şi afişată. Senzorul măsoară forţele de interacţiune dintre robot şi obiectele înconjurătoare, verifică corectitudinea traiectoriei descrisă de organului terminal şi "percepe", vizual sau tactil, obiectele din mediul înconjurător.
Realizarea unei strategii corecte de conducere, în condiţiile în care robotul intră în contact nemijlocit cu obiecte externe, impune existenţa unui sistem senzorial dezvoltat care sa identifice:
1. Prezenţa obiectului la contactul nemijlocit cu robotul (detecţia robotului);
2. Punctele de contact cu obiectul (localizarea obiectului);
3. Caracteristicile punctelor de contact, evaluarea forţelor şi momentelor ce iau naştere în punctele de contact.
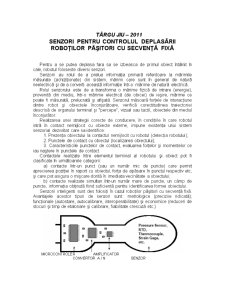
Contactele realizate între elementul terminal al robotului şi obiect pot fi clasificate în următoarele categorii:
a) contacte într-un punct (sau un număr mic de puncte) care permit aprecierea poziţiei în raport cu obiectul, forţa de apăsare în punctul respectiv etc, şi care pot asigura o mişcare dorită în imediata vecinătate a obiectului;
b) contacte realizate simultan într-un număr mare de puncte, un câmp de puncte, informaţia obţinută fiind suficientă pentru identificarea formei obiectului.
Senzorii inteligenti sunt des folosiţi în cazul roboţilor păşitori cu secvenţă fixă. Avantajele acestor tipuri de senzori sunt:: metrologice (preciziie ridicatǎ); funcţionale (autostare, autocalibrare, interoperabilitate) şi economice (reduceri de stocuri şi timp de etalonare şi calibrare, fiabilitate crescutǎ etc.)
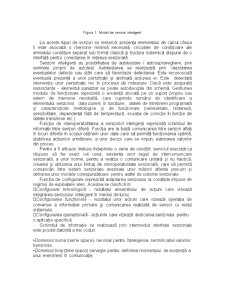
MICROCONTROLER AMPLIFICATOR
CONVERTOR A / N SENZOR
Figura 1. Model de senzor inteligent
La aceste tipuri de senzori se remarcǎ: prezenţa elementului de calcul cǎruia îi este asociatǎ o memorie minimǎ necesarǎ; circuitele de condiţioare ale emnalului constituie separat sub formǎ clasicǎ şi tructura sistemicǎ dispune de o interfaţǎ pentru conectarea în reţeaua senzorialǎ.
Senzorii inteligenţi au posibilitatea de autotestare / autosupraveghere, prin semnale proprii de autotest: Autotestarea se realizează prin: depistarea eventualelor defecte sau stări care să favorizeze defectarea. Este recunoscută eventuala prezenţă a unor perturbaţii şi anihilată acţiunea ei. Este detectată intervenţia unor perturbaţii noi în procesul de măsurare. Dacă este asigurată redundanţa - elementul parazitat se poate autodecupla din schemă. Gestiunea modului de funcţionare reprezintă o evidenţă stocată pe un suport propriu sau extern de memorie nevolatilă, care cuprinde numǎrul de identificare a elementului senzorial, data punerii în funcţiune, datele de întreţinere programatǎ şi caracteristicile metrologice şi de funcţionare (neliniaritate, histerezǎ, sensibilitate, dependenţǎ faţǎ de temperaturǎ, ecuaţia de corecţie în funcţie de datele transmise etc.).
Funcţia de interoperabilitatea a senzorilor inteligenţi reprezintă schimbul de informaţii între senzori diferiţi. Funcţia are la bază comunicarea între senzori aflaţi în locuri diferite în scopul obţinerii unor date care să permită funcţionarea optimă, stabilirea acţiunilor urmǎtoare, a unor decizii care se impun, estimarea valorilor din proces.
Pentru a fi eficace, trebuie îndeplinite o serie de condiţii: serviciul executat ca răspuns să fie exact cel cerut, existenţa unor reguli de intercomunicare senzorială, a unor norme, pentru a realiza o comunicare unitară şi nu haotică, crearea şi utilizarea unui limbaj de interoperabilitate senzorială, care să permită comunicări între sistem senzoriale destinate unor mărimi diferite precum şi definirea unor modele corespunzătoare pentru astfel de sisteme senzoriale.
Funcţia de configurare reprezintă adaptarea senzorului la condiţiile impuse de regimul de exploatare ales. Acestea se clasifică în:
Configurare tehnologicǎ - rezultatul ansamblului de acţiuni care vizeazǎ integrarea senzorului inteligent în mediul de lucru;
Configurarea funcţionalǎ - rezultatul unor acţiuni care vizeazǎ operaţia de conversie a informaţiei primare şi comunicarea realizatǎ de sensor cu restul sistemului;
Preview document




Conținut arhivă zip
- Senzori Pentru Controlul Deplasarii Robotilor Pasitori cu Secventa Fixa.doc
Alții au mai descărcat și

1. Introducere Cuvântul ,, robot ,, a fost folosit pentru prima dată în sensul acceptat astăzi, în anul 1920 de către scriitorul ceh K. Capek ,...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...