
Extras din referat
1. DESCRIEREA SISTEMULUI MECATRONIC
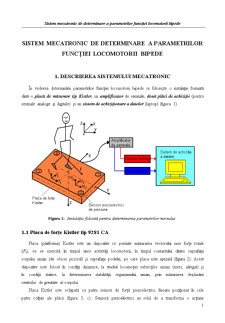
În vederea determinării parametrilor funcţiei locomotorii bipede se foloseşte o instalaţie formată dintr-o placă de măsurare tip Kistler, un amplificator de semnale, două plăci de achiziţie (pentru semnale analoge şi digitale) şi un sistem de achiziţionare a datelor (laptop) (figura 1).
Figura 1: Instalaţia folosită pentru determinarea parametrilor mersului.
1.1 Placa de forţe Kistler tip 9281 CA
Placa (platforma) Kistler este un dispozitiv ce permite măsurarea vectorului unei forţe totale (Ft), ce se exercită în timpul unor activităţi locomotorii, în timpul contactului dintre suprafaţa corpului uman (de obicei piciorul) şi suprafaţa podelei, pe care placa este aşezată (figura 2). Acest dispozitiv este folosit în condiţii dinamice, la studiul locomoţiei subiecţilor umani (mers, alergat) şi în condiţii statice, la determinarea stabilităţii organismului uman, prin măsurarea deplasării centrului de greutate al corpului.
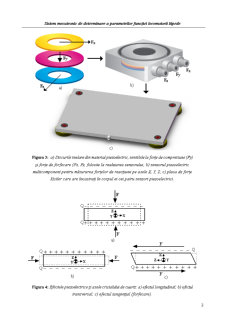
Placa Kistler este echipată cu patru senzori de forţă piezoelectrici, fiecare poziţionat în cele patru colţuri ale plăcii (figura 3, c). Senzorii piezoelectrici au rolul de a transforma o acţiune mecanică (forţa cu care subiectul acţionează asupra plăcii) într-un semnal electric fără nici o sursă exterioară de energie. Senzorii, folosiţi de către placa de forţe, conţin câte trei plăcuţe suprapuse de formă inelară, din cristale de cuartz, sensibile piezoelectric la forţe de compresiune (Fy) şi forţe de forfecare (Fx, Fz) (figura 3, a, b).
Figura 2: Placa de forţe Kistler tip 9281 CA.
În figura 4 sunt redate efectele piezoelectrice ale cristalului de cuartz, respectiv efectul longitudinal, transversal şi efectul tangenţial (forfecare). Axele de coordonate corespund cu axele cristalografice ale cristalului de cuartz. Axa Y este denumită şi axa optică, iar axa Z este denumită axa electrică.
În cazul efectelor piezoelectrice longitudinal sau tangenţial, sarcina electrică este direct proporţională cu forţa totală aplicată şi apare pe suprafaţa pe care este aplicată forţa. În plus, încărcarea electrică rezultată este dependentă de dimensiunile şi forma geometrică a elementului de cuartz.
Efectul transversal diferă de celelalte două efecte prin faptul că, sarcina electrică nu apare pe suprafaţa asupra căreia se aplică forţa ci pe acele suprafeţe normale la axa Z. De asemenea, sarcina electrică nu mai depinde de dimensiunile şi forma geometrică a elementului de cuartz. În acest caz, sarcina electrică depinde de relaţia mutuală dintre dimensiunile pe axele X şi Z. Astfel, prin alegerea unui element de cuartz mai subţire şi mai lung, se pot obţine încărcări electrice mai mari. Sensibilitatea normală în cazul efectului longitudinal este 2,31 pC/N, 4,62 pC/N pentru efectul tangenţial şi 500 pC/N pentru efectul transversal.
Figura 3: a) Discurile inelare din material piezoelectric, sensibile la forţe de compresiune (Fy) şi forţe de forfecare (Fx, Fz, folosite la realizarea senzorului; b) senzorul piezoelectric multicomponent pentru măsurarea forţelor de reacţiune pe axele X, Y, Z; c) placa de forţe Kistler care are încastraţi în corpul ei cei patru senzori piezoelectrici.
Figura 4: Efectele piezoelectrice şi axele cristalului de cuartz: a) efectul longitudinal; b) efectul transversal; c) efectul tangenţial (forfecare).
Valorile momentelor sunt deduse în urma măsurării forţelor de reacţiune şi din poziţia relativă a senzorilor pe placa de forţe. Astfel, forţa ce se aplică pe fiecare senzor se compune din trei componente: FX, FY, FZ, astfel rezultând un număr de 12 componente individuale (figura 5).
Preview document








Conținut arhivă zip
- Sistem Mecatronic de Determinare a Parametrilor Functiei Locomotorii Bipede.doc
Alții au mai descărcat și

Capitolul 1 Introducere Platformele mobile robotice sunt utilizate cel mai des in interiorul fabricilor sau depozitelor pentru transportul de...

1.Tema de proiectare: Sa se proiecteze sistemul de actionare electrica pe axa z a unui manipulator cartezian(fig.1) Date de proiectare: • Viteza...

ARGUMENT Acest proiect işi propune să prezinte câteva dintre cele mai reprezentative sisteme mecatronice, cu argumente, pentru fiecare caz în...

Denumit banda transportoare sau conveior cu banda sau transportor cu banda conveiorul este un dispozitiv de transport sau de manipulare ce permite...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...


1.Componenta instalatiilor de actionare pneumatica. Exista 3 grupe de instalatii: -producerea aerului comprimat; -distribuirea aerului...

Ce este mecatronica? În multe domenii ale tehnicii poate să fie observată integrarea dintre sistemele mecanice şi electronică, integrare care s-a...